
[Unity] Quaternion
Quaternion
쿼터니언이란 유니티에서 회전을 표현하기 위한 단위로 사용된다.
각도의 단위, 복소수 4차원 벡터
인스펙터 창의 Rotation은 오일러각의 계산을 사용하지만 내부적으로는 쿼터니언을 사용한다고 보면된다.
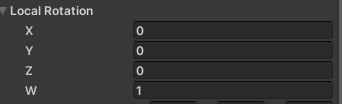
실제로 씬에서 보고싶다면 인스펙터 뷰를 Debug모드로 변경하고 Tranform컴포넌트를 보면 4개워 원소를 구성된것을 확인할 수 있다.
a
짐벌락현상에 걸리지 않도록 하기 위해서인데 회전축이 겹쳐서 사라지는 현상을 말한다.
오일러각
3차원 공간의 절대좌표를 기준으로 회전을 구하는 방식이다.
좌표처럼 x,y,z가 존재하기 때문에 직관적이고 조작이 간편하다(따라서 인테페이스로 제공한다.)
앞서 말한 짐벌락 현상이 발생 가능성이 농후함..
쿼터니언
3개의 축이 아닌 4개의 수로 이루어져서 벡터와 스칼라를 담당한다.
유니티공식 문서에서도 각성분에 대해서 잘알지 못한다면 수정을 추천하지 않는다.
댓글남기기